儘儃僢僩奐敪媄弍丂乣棳懱傾僋僠儏僄乕僞偺偛徯夘乣
摉幮偼丄2002擭1寧丄摉幮偑廬棃偐傜帩偮僾儔僗僠僢僋惉宍壛岺僄儞僕僯傾儕儞僌丄嬥宆愝寁惢嶌媄弍丄帺摦婡丄擇師壛岺婡偺愝寁惢嶌摍偺僜僼僩柺丒僴乕僪柺椉曽偐傜偺僄儞僕僯傾儕儞僌傪嬱巊偟偰擇懌憱峴偡傞恖娫宆儘儃僢僩奐敪偵拝庤偟傑偟偨丅奐敪偺拞偱惗傑傟偨媄弍偼丄暃嶻暔偲偟偰摉幮偼條乆側岺嬈梡僾儔僗僠僢僋晹昳偵偦偺墳梡媄弍傪揔梡偟偰嶲傝傑偟偨丅
偙偙偱偼丄偦偺媄弍偺傂偲偮偱偁傝傑偡乽棳懱傾僋僠儏僄乕僞乕乿偵偮偄偰偛徯夘偄偨偟傑偡丅
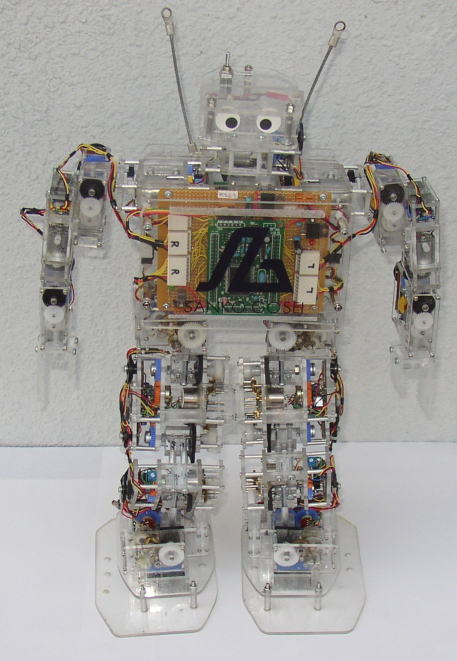
儈儘僋1崋
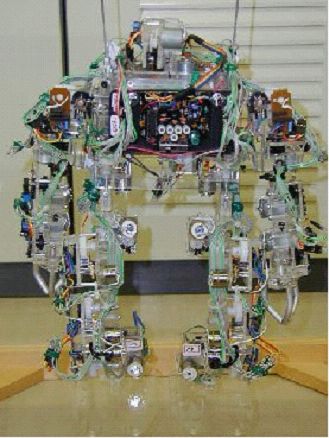
儈儘僋3崋
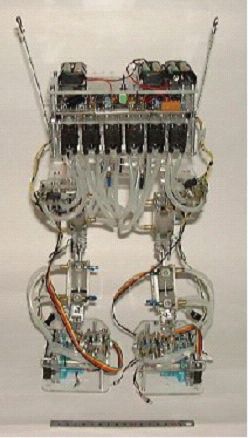
儈儘僋6崋
僒乕儃幃傾僋僠儏僄乕僞奐敪
惂屼婎斅丒僜僼僩奐敪
僒乕儃幃傾僋僠儏僄乕僞夵椙
棳懱傾僋僠儏僄乕僞奐敪
僥僗僩慺懱
棳懱傾僋僠儏僄乕僞偺摿挜
帺桼両娙扨両徣僄僱両嫮偄両埨掕両
嘆帺桼丂-丂嶌摦晹偲弌椡晹偺暘棧偑壜擻
丂丂丂丂丂丂丂丂丒廳検僶儔儞僗偺帺桼搙憹戝
丂丂丂丂丂丂丂丂丒嶌摦晹偺彫宆壔幚尰
嘇娙扨丂-丂慡偰偺棳懱偱埵抲惂屼偑梕堈
嘊徣僄僱丂-丂埵抲儂乕儖僪帪偼丄棳懱偑僽儗乕僉偲側傝丄忢帪丄椡傪偐偗傞昁梫偑側偄
嘋嫮偄丂-丂嶌摦晹偵媫寖側晧壸偑壛傢偭偨帪偱傕丄棳懱偺僟儞僷乕岠壥偱夡傟偵偔偄
嘍埨掕丂-丂婡峔偺僈僞丄墳摎惈偐傜偔傞摦嶌偺僴儞僠儞僌尰徾傊偺懳墳偑庢傝堈偄
丂丂丂丂丂丂丂丂丂丂儈儘僋6崋丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂棳懱傾僋僠儏僄乕僞乕偺峔憿恾
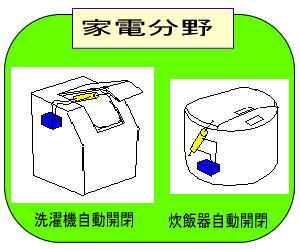
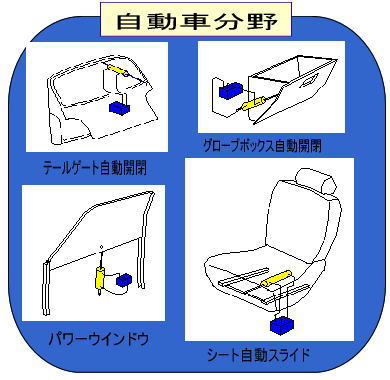
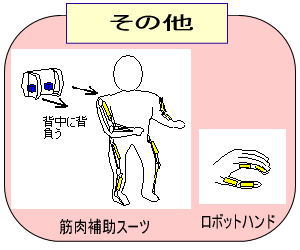
棳懱傾僋僠儏僄乕僞偺峀偑傞壜擻惈
棳懱傾僋僠儏僄乕僞偼奐暵婡峔偵揔梡壜擻丅僗儁乕僗偑惂尷偝傟傞偲偙傠偵嵟揔丅乮摦椡尮偲弌椡晹偑暘棧壜擻側偨傔乯
Copyright(c) SANKO GOSEI LTD. All rights reserved.